Корзина пуста
Измерения параметров векторной модуляции
| А.В. Пивак к.т.н., АО «ПриСТ» |
Измерения параметров модуляции всегда выделялось в отдельный вид измерений. Свидетельством тому является наличие государственных поверочных схем и государственных эталонов амплитудной и частотной модуляций (АМ и ЧМ), большого количества рабочих эталонов по поверке АМ и ЧМ измерителей, рабочих средств измерений параметров аналоговой модуляции. Сейчас аналоговая модуляция уступает место цифровой, при которой аналоговый сигнал несущей частоты модулируется не аналоговым информативным сигналом, а цифровой битовой последовательностью (сам принцип модуляции при этом всё равно остаётся аналоговым). Необходимость перехода от аналоговой к цифровой модуляции обусловлена повсеместным развитием цифровой техники, использующей для передачи информации цифровые потоки данных, а также требованиями по ограничению занимаемой полосы частот (ширины спектра) для электромагнитного модулированного колебания, несущего информацию. Возрастание скоростей и объёма передаваемой информации при ограничении на расширение требуемой для передачи полосы частот приводит к усложнению применяемых схем модуляции и соответственно усложнению необходимой аппаратуры, в том числе и измерительной. Например, следующим уровнем после перехода от аналоговой модуляции к цифровой является мультиплексирование передаваемой информации с разделением во временной области. При этом в той же занимаемой полосе частот и с использованием только одного несущего колебания может разновременно передаваться несколько различных пакетов с цифровой модуляцией (данный принцип используется в сетях сотовой связи стандарта GSM).
 Рисунок 1. Диаграмма состояний векторной модуляции |
В процессе модуляции могут изменяться как амплитуда, так и фаза/частота колебаний. Максимальный объём передаваемой информации достигается при одновременном изменении амплитуды и фазы сигнала. Однако сгенерировать или декодировать такой сигнал непосредственно (с помощью амплитудного и фазового модуляторов) тяжело. На практике данное решение осуществляют и описывают с помощью квадратурных модуляторов и полярных координат, образованных парой ортогональных векторов напряжений: синфазного с несущим колебанием I и сдвинутого на 90° Q. Такое представление позволяет рассматривать любую точку в полярных координатах в виде набора координат напряжений (I, Q) либо в виде вектора, определяемого амплитудой и фазой (рис. 1). Соответственно, реализованная и описанная таким образом модуляция называется векторной, а полярные координаты – диаграммой состояний. При этом погрешность векторной модуляции определяется отличием реальной траектории или положения точки, соответствующей заданной модуляции, от идеальной. Для цифровой векторной модуляции наиболее распространённой величиной, описывающей погрешность модуляции, является модуль вектора ошибки EVM, определяемый по формуле:
 где (1)
где (1)
где Rk – это вектор напряжений на диаграмме состояний, соответствующий “идеальному” опорному положению k-го символа из выборки длиной М, а Vk – это вектор, соответствующий измеренному положению k-го символа.
В настоящий момент активно разрабатываются, производятся и применяются лабораторные средства измерения для воспроизведения/измерения векторной модуляции с нормированным значением модуля вектора ошибки. К ним относятся векторные генераторы ВЧ, векторные анализаторы спектра ВЧ, осциллографы (платы аналого-цифрового преобразователя – АЦП) и генераторы сигналов произвольной формы (платы цифро-аналогового преобразователя – ЦАП). Соответственно, встаёт задача метрологического обеспечения измерений векторной модуляции, которая в нашей стране на настоящий момент не решена. Далее будут рассмотрены возможные пути её реализации.
Для начала определим математическую модель процесса измерения, т.е. составим уравнение измерений. Из анализа типовых схем генераторов/измерителей векторной модуляции следует, что они включают в себя следующие основные части: программное обеспечение для цифровой обработки сигналов; ЦАП или АЦП; носители частоты [1]. Схемы генератора и измерителя являются взаимообратимыми, поэтому приведём этапы работы средств измерений векторной модуляции на примере измерителей типа векторных анализаторов спектра:
- Сигнал, поступающий на вход анализатора спектра, переносится с помощью встроенного гетеродина на промежуточную частоту (ширина спектра, переносимого на ПЧ обычно составляет 20…160 МГц);
- Сигнал промежуточной частоты оцифровывается во временной области с помощью АЦП;
- Цифровые отсчёты сигнала поступают в программное обеспечение, где обрабатываются с помощью “цифрового квадратурного модулятора”;
- Полученные после программной обработки результаты выводятся в виде раскодированных битов, частотного спектра, временных зависимостей демодулированных напряжений I и Q, полярных координат, модуля векторной ошибки, рассчитываемого по формуле и т.д.
Исходя из определения модуля векторной ошибки, величиной, которая измеряется анализатором, является напряжение Vизм. Тогда, уравнение измерений принимает вид:
![]() где (2)
где (2)
где Хi – зависимость результата измерений от параметров анализатора спектра, АЦП и алгоритма цифровой обработки сигнала (ЦОС) соответственно, а Vсвч – входной сигнал.
Такими параметрами являются:
- для анализатора спектра – собственные тепловые шумы, фазовые шумы гетеродина, нелинейность смесителя, гармонические и негармонические искажения, нелинейность АЧХ и ФЧХ тракта ПЧ, погрешность установки частоты гетеродина;
- для АЦП – нелинейность АЦП, погрешность квантования, погрешность частоты дискретизации;
- для ЦОС – недостаточная частота дискретизации для обработки требуемой полосы частот, разрывность по фазе между пакетами разновременно собранной информации, неправильное определение используемых фильтров и скорости передачи информации (частоты модулирующего колебания).
Из анализа приведённых факторов сразу же вытекает следующий вывод. Результат измерения векторной ошибки зависит от большого количества факторов, не все из которых зависят собственно от средства измерения. Таким образом, определить жёсткую спецификацию для погрешности измерения EVM “на все случаи жизни” практически невозможно. При этом наиболее проблематичным является определение фильтров, применяемых в процессе векторной модуляции, т.к. отличие предполагаемого в работе фильтра от реально используемого можно оценить только очень примерно. Именно по этой причине производители средств измерений параметров векторной модуляции обычно указывают либо типичные значения погрешностей, либо нормируют погрешности для строго определённых видов модуляции, например АМ/ЧМ, предоставляя право самим пользователям оценивать погрешность измерения для конкретных условий проведения измерений.
Для упрощения дальнейшего анализа сделаем несколько допущений:
- влияние фазовых и тепловых шумов гетеродина являются пренебрежимо малыми и в дальнейшем не учитываются;
- все погрешности, связанные с настройками теоретических фильтров в программном обеспечении, будем рассматривать как часть погрешности входного сигнала и также не будем учитывать в дальнейшем анализе.
Таким образом, уравнение измерений примет вид:
![]() где (3)
где (3)
где функция F в случае простейшей модели имеет вид множителя в виде комплексного числа вида k*ejq, а Dас,ацп , Dцос являются погрешностями, вносимыми анализатором спектра со встроенной АЦП и алгоритмом цифровой обработки полученной информации соответственно.
Подставляя уравнение (3) в (1) и заменяя дискретные отсчёты Vk вектора измеренного сигнала Vизм на непрерывный скалярный сигнал Vсвч, а также переводя абсолютные погрешности в относительные, получим после преобразований:
 где (4)
где (4)
Естественно, применяя более сложные модели с большим количеством переменных, можно получить более точные оценки погрешностей, но при этом усложнить сам процесс анализа. В нашем случае определение составляющих, входящих в уравнение измерений, сводится к получению оценки для погрешности, получаемой при цифровой обработке сигналов с помощью программного обеспечения, и экспериментального определения dас,ацп. Данный эксперимент должен заключаться в подаче на вход анализатора спектра известного сигнала Vсвч, величина напряжения которого прослеживается к эталонам основных единиц системы СИ, и измерения анализатором модуля векторной ошибки. Отличие полученного результата от ожидаемого будет характеризовать dас, ацп.
Для определения погрешности ЦОС воспользуемся версией программного обеспечения (ПО) Modular, предназначенной для генерации цифровой последовательности сигналов с различными видами векторной модуляции и дальнейшего их воспроизведения в виде реальных сигналов с помощью генераторов сигналов произвольной формы с цифро-аналоговыми преобразователями. Используемый генератор имеет характеристики, приведённые в табл. 1. Экспериментальная оценка параметров линейности ЦАП в динамическом (40 дБ) и частотном диапазоне (полоса 1 МГц) на частоте 10 МГц, проведённая с помощью анализатора спектра и вольтметра образцового 1-разряда, составляет не более 0,1% по каждому из параметров. Типичная погрешность линейности фазо-частотной характеристики ЦАП в полосе 1 МГц составляет около 0,5 градуса [2]. Таким образом, можно ожидать, что “нарисованный” с помощью этого генератора сигнал [3], будет отличаться от идеальной математической модели не более, чем на 0,3%.
| Таблица 1. Характеристики генератора | ||
| Разрядность, бит | Объём памяти, Мб | Максимальная частота дискретизации, МГц |
| 12 | 16 | 1200 |
Затем, с помощью ПО были созданы два реперных модулированных сигнала с несущей частотой 10 МГц и частотой модулирующего колебания 1 кГц:
- амплитудно-модулированный сигнал с коэффициентом амплитудной модуляции Кам=100%,
- частотно-модулированный сигнал с девиацией частоты 2,4048 кГц, что соответствует первому нулю функции Бесселя.
 Рисунок 2. Характеристики аналоговой модуляции |
Сигналы создавались исходя из следующих соотношений. Один период сигнала частотой 10 МГц строится по 100 точкам, т.е. используется частота дискретизации 1 ГГц. Общая длительность расчётного сигнала составляет один период модулирующего колебания 1 мс, т.е. проводятся вычисления по 1 Мб точек. Данные сигналы являются сигналами с аналоговой модуляцией, но рассчитываются в ПО по их представлению в векторном формате (рис. 2).
Полученные сигналы были загружены в генератор и были проведены измерения значений Кам и девиации частоты. Точка Кам = 100% устанавливалась как точка соприкосновения положительной и отрицательной частей огибающего колебания по осциллографу (рис.3), а девиация частоты определялась по обращению в ноль центральной спектральной составляющей модулированного сигнала на анализаторе спектра [4]. Погрешность установки измерялась путём изменения параметров модуляции формируемых сигналов в узкой области для установления точных соотношений по образцовым средствам измерений, где погрешность рассчитывалась как разность между номинальным значением параметра модуляции и тем, при котором наблюдалось точное соотношение. Применяемые в качестве образцовых средств измерений анализатор спектра и осциллограф имеют динамический диапазон для проведения требуемых измерений не менее 70 дБ, что обеспечивает относительную разрешающую способность не хуже 0,05%. Полученные в процессе эксперимента погрешности установки параметров модуляции не превысили 0,1%. Учитывая полученный результат, а также экспериментальные оценки параметров ЦАП, суммарная погрешность генератора и алгоритма цифровой обработки, реализованного в ПО, может быть оценена, как не превышающая 0,3%, а вклад собственной погрешности ЦОС – не более 0,1%.
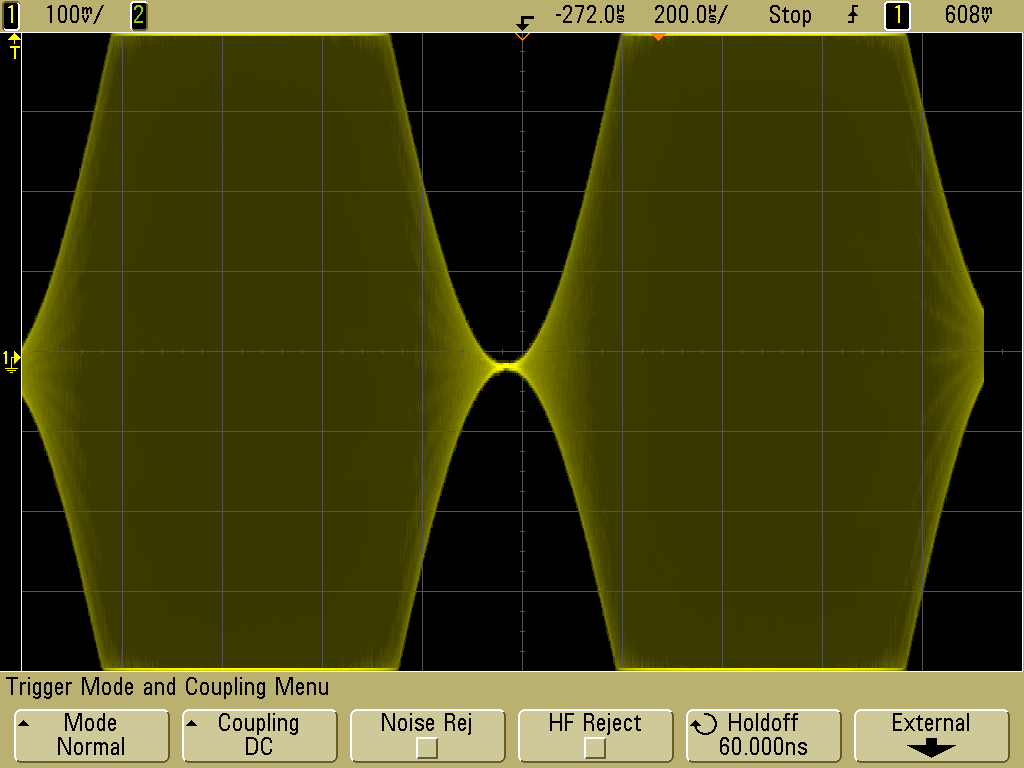 |
Рисунок 3. Сигнал с Кам=100% |
Для определения dас,ацп рассмотрим уравнение для расчёта модуля векторной ошибки (4). Как следует из уравнения, модуль векторной ошибки фактически является аналогом хорошо известного соотношения “сигнал/шум” [5]. Поэтому экспериментальное определение погрешности измерения модуля векторной ошибки может сводиться к следующей методике:
- На векторный анализатор подаётся немодулированный сигнал, принимаемый за опорный R, и включается простейший демодулятор типа QPSK или FSK, результатом измерения будет являться единичная точка на диаграмме состояний.
- Измерение зависимости паразитного модуля векторной ошибки от уровня входного сигнала будет давать оценку нижнего шумового предела анализатора по измерению EVM (аддитивную составляющую погрешности).
- Затем в полосу несущей немодулированного сигнала добавляется шумовой сигнал известной мощности, который будет отображаться на диаграмме состояний аналогично рис. 4., при этом:
- Отличие измеренного значения EVM анализатором спектра от теоретического значения является погрешностью измерения EVM (мультипликативной погрешностью), т.к. по [5] погрешность измерения EVM зависит от самой величины EVM.
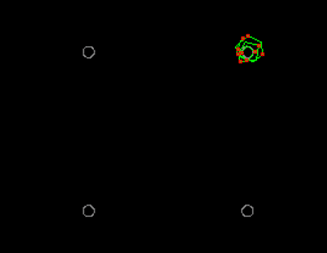
Рисунок 4. Отображение несущей
с шумовым сигналом на векторной диаграмме
![]() где (5)
где (5)
где Vшум – напряжение шумового сигнала.
Мощность несущей и мощность шумового сигнала, пропорциональные квадратам напряжений, измеряются отдельно образцовым измерителем мощности. На основании этих результатов рассчитывается набор теоретических значений модуля векторной ошибки как корень квадратный из отношения мощностей шумового сигнала и сигнала несущей. При этом основную роль в погрешности расчёта теоретического значения будут играть погрешности измерения отношения мощностей и погрешности рассогласования, но в настоящее время они могут быть снижены до 0,2%.
Для практического апробирования методики использовались векторный анализатор спектра совместно с ПО, термоэлектрический измеритель мощности и генератор произвольной формы для формирования шумового сигнала полосой 1 МГц на несущей частоте 10 МГц, в качестве которой использовался собственный выход опорной частоты анализатора спектра. Результаты измерений приведены в табл. 2, при этом считается, что на частоте 10 МГц погрешность рассогласования пренебрежимо мала, а погрешность измерения отношения мощностей менее 20 дБ для термоэлектрического измерителя мощности не превышает 0,1% [6]. Ограничение измерений максимальным EVM 30% и рост погрешности связаны с тем, что используемое программное обеспечение при больших значениях в режиме отображения EVM теряет захват несущей частоты, и, по всей видимости, дальнейший анализ необходимо вести в режиме отображения I(t), Q(t).
| Таблица 2. Результаты измерения погрешности EVM | ||||
| EVM, % | 0 | 10 | 20 | 30 |
| Погрешность, % | 0,12 | 0,35 | 0,43 | 0,8 |
Для проверки полученных результатов с помощью ПО и генератора был сформирован реальный сигнал с векторной модуляцией на несущей 10 МГц, модуляция QPSK, скорость модуляции 100 кГц. Затем сигнал был подан на анализатор спектра и проведена демодуляция. Измеренное значение EVM составило 0,6% (рис. 5). В предположении, что вклад в полученную погрешность равномерно распределён между генератором и анализатором спектра и погрешности некоррелированы, следует, что погрешность анализатора составляет 0,3%. Это значение совпадает с результатами табл. 2 и оценками для погрешности генератора.
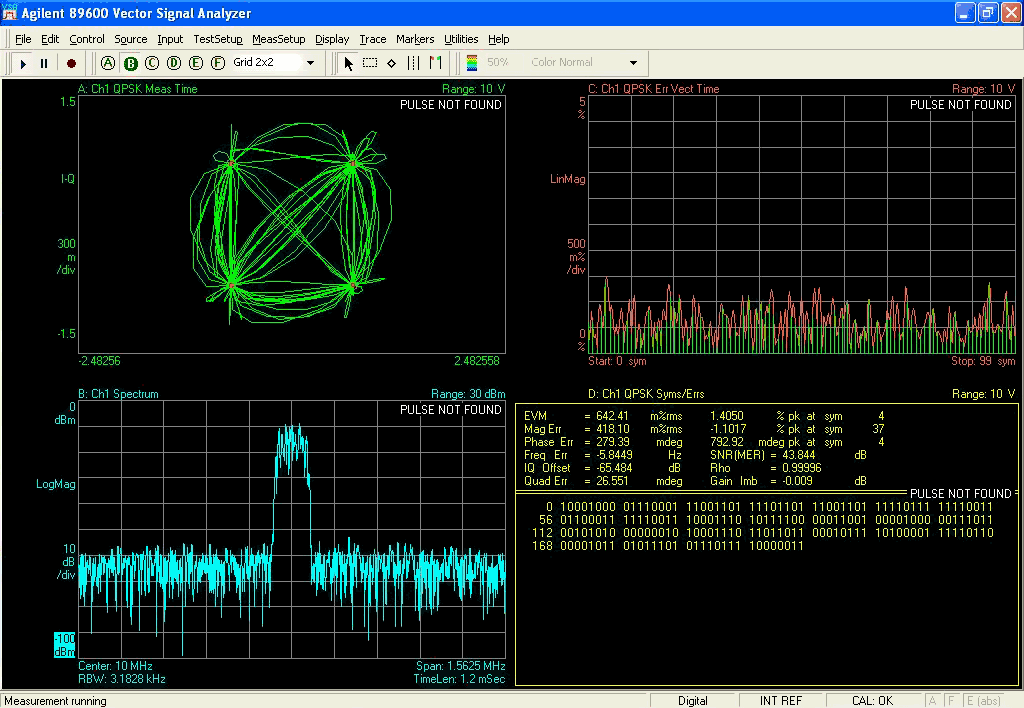 |
Рисунок 5. Результаты измерения сигнала с модуляцией QPSK |
Анализ полученных результатов показывает, что погрешности измерения EVM для векторных анализаторов спектра, выпускаемых в настоящее время, ограничены снизу значением 0,3…0,5%. Причём при возрастании частоты несущей скорости модуляции (полосы модуляции) или усложнения схемы модуляции погрешность измерения будет существенно возрастать.
Полученные в работе результаты для шумового предела погрешности измерения EVM совпадают с теми типичными значениями погрешностей, которые приводят изготовители в технических характеристиках подобных средств измерений [2], а оценки мультипликативной погрешности позволяют заложить основу для их нормирования в широком диапазоне значений EVM.
Таким образом, данная методика может являться своеобразным фундаментом для построения государственной системы метрологического обеспечения измерения векторной модуляции, включая параметры аналоговой модуляции при их выражении в векторной форме. При этом измерение EVM непосредственно привязывается к измерениям мощности сигналов, для которых система метрологического обеспечения уже давно существует.
Автор выражает благодарность господину Бренту Риду за помощь в обсуждении статьи.
Литература
- Vector Signal Analysis Basics. Application Note 150–15 // Agilent Technologies.
- PSA Series Spectrum Analyzers 40 and 80 MHz Bandwidth Digitizers. Technical Overview // Agilent Technologies.
- Пивак А.В. https://prist.ru/info/articles/kni.htm title=В статье рассмотрены методы измерения и воспроизведения напряжений с нормированным значением коэффициента гармоник, основанные на применении цифровой техники. Приведены результаты экспериментальных исследований, которые могут быть использованы при разрабо class=l>Измерение коэффициента гармоник напряжения сигнала, заданного во временной области // Мир измерений. – 2006. – № 6.
- Павленко Ю.Ф., Шпаньон П.А. Измерение параметров частотно-модулированных колебаний // Москва: “Радио и связь”. – 1986.
- EVM measurement design for 3G test equipment // Willtek Communication, 2003.
- Перепелкин А.В. Нелинейность функции преобразования термоэлектрических преобразователей мощности СВЧ // Измерительная техника. – 1988. – №5.
Автор: Пивак А.В. к.т.н.
Дата публикации: 07.07.2008
У нас представлены товары лучших производителей
АО «ПриСТ» предлагает оптимальные решения измерительных задач.
У нас вы можете купить осциллограф, источник питания, генератор сигналов, анализатор спектра, калибратор, мультиметр, токовые клещи, поверить средства измерений или откалибровать их. Также мы поставляем паяльно-ремонтное оборудование, антистатический инструмент, промышленную мебель. Мы имеем прямые контракты с крупнейшими мировыми производителями измерительного оборудования, благодаря этому можем подобрать то оборудование, которое решит Ваши задачи. Имея большой опыт, мы можем рекомендовать продукцию следующих торговых марок:


Внимание! Отсутствие ошибок и опечаток не гарантируется. В технические характеристики средств измерений неутвержденного типа производителем могут быть внесены изменения без предварительного уведомления. Соответствие важных параметров требует уточнения. Полные технические характеристики предоставляются по отдельному запросу. Нашли ошибку? Выделите мышкой и нажмите Ctrl+Enter.

